POR AMÉRICO WILSON AZEVEDO SOARES, NATHÁLIA LIMA CARAN, PEDRO LUCAS SOSSAI REGANINI DE CARVALHO E REBECCA CARDOSO SILVA SANTOS*
Resumo — A FLONA do Rio Preto realiza atividades com cunho de educação ambiental, e um dos seus trabalhos é o projeto “Trilhas da Floresta Nacional do Rio Preto”, com idealização da Suzano Papel e Celulose, sendo realizado em parceria com a Associação Ekobé Brasil – Pesquisa, Conservação e Educação Ambiental. Nessas trilhas ficam expostas algumas réplicas robóticas de espécies de animais da região norte do estado do Espírito Santo. Essas réplicas possuem em seu conjunto componentes eletrônicos, os quais são responsáveis por controlarem os movimentos e sons produzidos pelas mesmas. Por ficarem muito tempo expostas às ações do meio ambiente, como, calor excessivo, chuva e ventos fortes, elas precisam de manutenção e reparo. A síntese desse trabalho se resume à metodologia utilizada, quanto tempo durou, qual foi o custo, quais foram os resultados e qual foi a relevância dessa manutenção. Faz-se importante frisar que a proposta de reparo foi feita apenas no sistema eletrônico dos robôs e não na parte física.
Palavras-chaves— Animais, eletrônico, FLONA, manutenção, movimento, reparo, réplicas, robóticas, sistema elétrico e som.
I. INTRODUÇÃO
Esse trabalho, orientado pelos professores do curso técnico em eletrotécnica Cristiano Luis Silva Tavares e Thomaz Rodrigues Botelho, teve como principal objetivo a contribuição direta na aprendizagem de maneira lúdica sobre a preservação do meio ecológico, trazendo uma aproximação das crianças, público alvo do Projeto Trilhas, com a natureza. Os representantes da reserva perceberam que suas réplicas já não estavam respondendo da maneira desejada, pois, estavam com seus componentes elétricos velhos e danificados, atrapalhando, assim, o pleno desenvolvimento de seu projeto. Com isso, surgiu-se a necessidade de uma intervenção de estudantes do técnico em eletrotécnica do Instituto Federal do Espírito Santo-campus São Mateus. Para que o problema fosse atendido e o objetivo fosse efetivado, foi requisitada a manutenção, pelos estudantes, da parte elétrica de réplicas robóticas de alguns animais, como o macaco Bugio, espécie na qual se focou esse estudo.
II. FUNDAMENTAÇÃO TEÓRICA
Com o rápido avanço tecnológico, especialmente na área da eletrônica, houve o desenvolvimento de inúmeras possibilidades de inovação em diversas esferas, sendo umas delas na educação ambiental, no qual os desenvolvimentos de sistemas robóticos ainda não são muito utilizados. Atualmente estão sendo utilizados três exemplares de réplicas robóticas de animais como ferramentas para o aprimoramento de ações na Educação Ambiental que se encontram no interior de uma unidade de conservação localizada na Floresta Nacional do Rio Preto. Pelo fato das réplicas robóticas estarem presentes na trilha, lidando com o ambiente externo e sujeitas a intempéries, as mesmas foram sendo danificadas com o tempo e reparos foram necessários. As réplicas além de serem fisicamente iguais aos animais os quais representam, emitem sons e movimentos característicos dos mesmos, sendo compostos por um circuito microcontrolador. As réplicas possuem como objetivo auxiliar jovens e crianças a aprenderem como preservar o meio ambiente, criando uma maior aproximação com a natureza.
Neste projeto em específico foram realizados os reparos da réplica dos macacos Bugio, típicos da região em questão.
Uma vez que o circuito e programação originais foram perdidos, foi necessária a elaboração de um novo circuito que fosse compatível com o primeiro, para que os robôs funcionassem de maneira similar ao projeto original, garantindo um melhor funcionamento do mesmo e aumentando o prazo para a próxima manutenção.
O trabalho realizado contou com o auxílio e colaboração dos professores coordenadores em todo o processo. Ademais, foram utilizados conhecimentos adquiridos ao longo do curso técnico, principalmente da disciplina de eletrônica por envolver o manuseio de materiais como servos motores, sensores e microcontroladores da família arduíno.
A programação utilizada foi pensada e feita com o uso do sensor de presença, que tem como função detectar se algo está passando no local, ou seja, para que os macacos emitam sons e realizem movimentos o sensor terá que identificar a presença de algo ou alguém passando o local, acionando o circuito. Após o acionamento, o mesmo permanece ligando por cerca de um minuto e meio e volta a atuar a partir do sensor novamente.
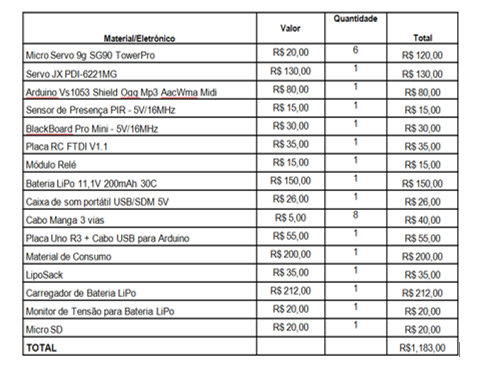
III. CUSTO
IV. METODOLOGIA
Durante a realização do projeto foi seguido um planejamento de troca de materiais e testes de funcionamento a partir do esquema apresentado na Figura 2.
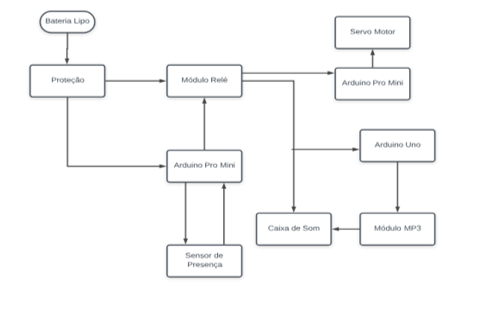
• O sistema proposto será alimentado por uma bateria lipo com tensão de 11.1V e capacidade de 2200 mA.
• A proteção do circuito é formada por um fusível de 2A para evitar possíveis curtos no circuito e sobrecarga da bateria, bem como um diodo 1N4007 que evita a inversão de polaridade durante o acionamento do circuito.
• O módulo Relé servirá como chave, o acionamento do mesmo será realizado através de um comando dado pelo arduino pro mini, derivado de um sensor de presença que acionado fechará o circuito alimentando os outros arduinos pro mini (escravos) e também o arduino uno com shield MP3.
• O arduino pro mini faz o controle direto dos servos motores, de acordo a elaboração do projeto foi escolhido um para cada servo motor usado, facilitando o movimento. Nesse projeto foi utilizado um programa que fazia o servo mexer a cada intervalo de tempo de maneira modular.
• A caixa de som será alimentada por uma bateria própria.
• O arduino uno fará o controle do módulo MP3, neste mesmo módulo será ligado um cabo P2 a caixa de som, neste cabo serão transmitidos comandos de som para a caixa.
V. RESULTADOS
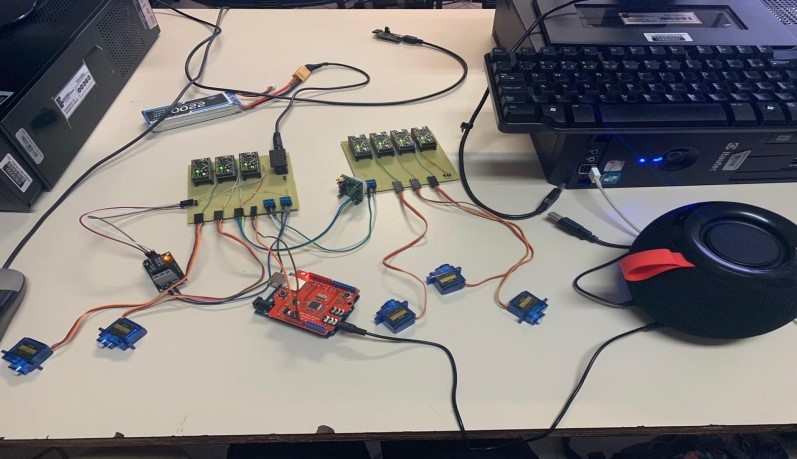
Os resultados adquiridos por meio dos métodos abordados foram satisfatórios. A tarefa inicial se resumia na manutenção das réplicas eletrônicas de animais que habitam a floresta, após exatamente cinco testes os resultados atingiram o esperado, ou seja, o sistema funcionou corretamente.
De maneira mais detalhada, as metas antes colocadas com o objetivo da correta realização do trabalho foram atingidas, sendo elas:
• O correto funcionamento dos servos.
• A sincronia dos movimentos com a emissão do som.
• O reconhecimento de movimento para o acionamento do circuito.
• A programação utilizada para a funcionalidade do projeto.
• A alimentação de maneira efetiva para tais resultados.
VI. CONCLUSÃO
A realização do trabalho apresentou, de forma simples e fácil, a reciclagem de ideias estudadas priori, as quais foram utilizadas para cumprir a finalidade do presente trabalho. Com algumas inovações, o dever realizado foi concluído com sucesso, sem deixar de lado a utilização de saberes adquiridos no curso técnico que os integrantes do grupo pertencem.
Assim, com a orientação de profissionais da área abordada e o trabalho árduo do grupo em questão, o objetivo foi atingido com maestria, e ainda pôde deixar um legado para os próximos integrantes deste curso, que irão receber ensinamentos equivalentes que este grupo recebeu para, dessa maneira, praticá-los.
VII. AGRADECIMENTOS
Primeiramente, os autores desse trabalho gostariam de agradecer à Suzano Papel e Celulose, mais especificamente à Associação Ekobé Brasil – Pesquisa, Conservação e Educação Ambiental por idealizarem e investirem nesse projeto tão importante. Em seguida, a FLONA merece os agradecimentos por acolher o projeto e por dedicar seus dias de trabalho à preservação do meio ambiente. Também é necessário agradecer aos orientadores do trabalho, Cristiano Tavares e Thomaz Rodriguez, por auxiliarem e ensinarem seus alunos as melhores maneiras para desenvolverem e concluírem o mesmo.
VIII. REFERÊNCIAS
[1] JURESWSKI, T. K.; SILVA, T. A. Recuperação de Réplicas Robóticas de Animais da FLONA – Floresta Nacional do Rio Preto, 2018.
…
*Alunos egressos do Instituto Federal do Espírito Santo-Ifes – Campus São Mateus no Curso de Ensino Médio Integrado ao Técnico em Eletrotécnica, sob orientação dos Professores Cristiano Luís Silva Tavares e Thomaz Rodriguez Botelho.
CENSURA ZERO – AQUI TEM CONTEÚDO! | REDAÇÃO MULTIMÍDIA



{kind=link}